
Abstract
Introduction
The economics of expanding seismic surveys has reawakened interest and investigation into automatic velocity estimation methods. At the same time, the value of high quality, high density imaging velocity analysis has been documented for nearly all aspects of post-imaging analysis, including basic structural and stratigraphic interpretation, AVO, overpressure analysis, 4D work, and others.
To reliably and repeatably satisfy the above velocity determination needs, a data driven automatic approach – AutoImager – has been developed for migration velocity determination. The foundation of the velocity determination is the quantification of the quality of the prestack imaging as a function of migration velocity, through objective measures derived from both the image gathers, and the image cube/section (see Figure 1). The automatic optimization of these objective measures to determine the best migration velocity has proven to be robust, repeatable, and convergent (see Figure 2).
It was expected that the objective data-driven nature of the automatic determination, along with the iterative optimization and the high density of the velocity determination (in space and time) will all lead to an improved time migration image and velocity field. In turn, it is expected that the veracity of the initial interval velocity model constructed from the time migration velocity field and image will also be enhanced.
Results
The AutoImager system has been successfully applied to a plethora of real and synthetic 2D and 3D data sets. The presentation will contain a brief outline of the automatic methodology for calculating migration velocities, and the approach to using the resultant time migrated image and imaging velocities to construct initial velocity models for depth imaging and other applications requiring interval velocity models. Examples will include:
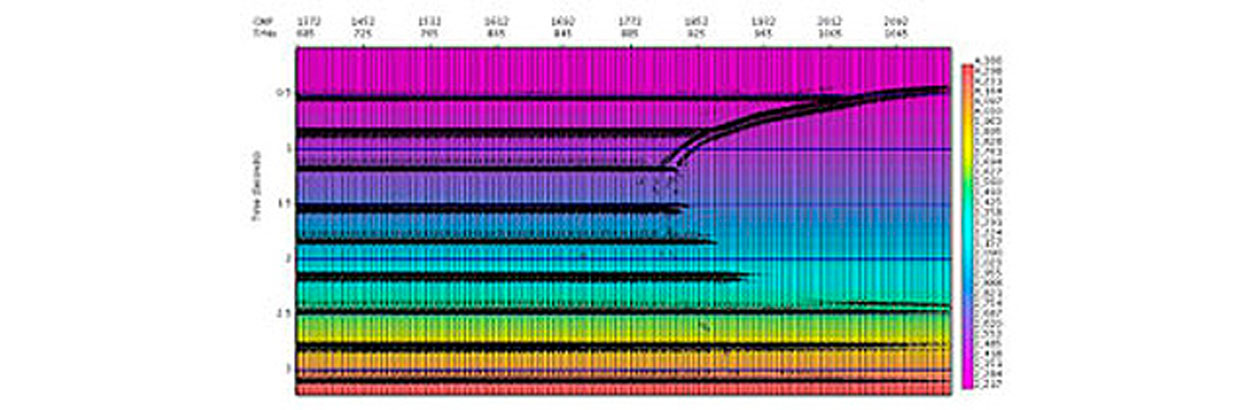
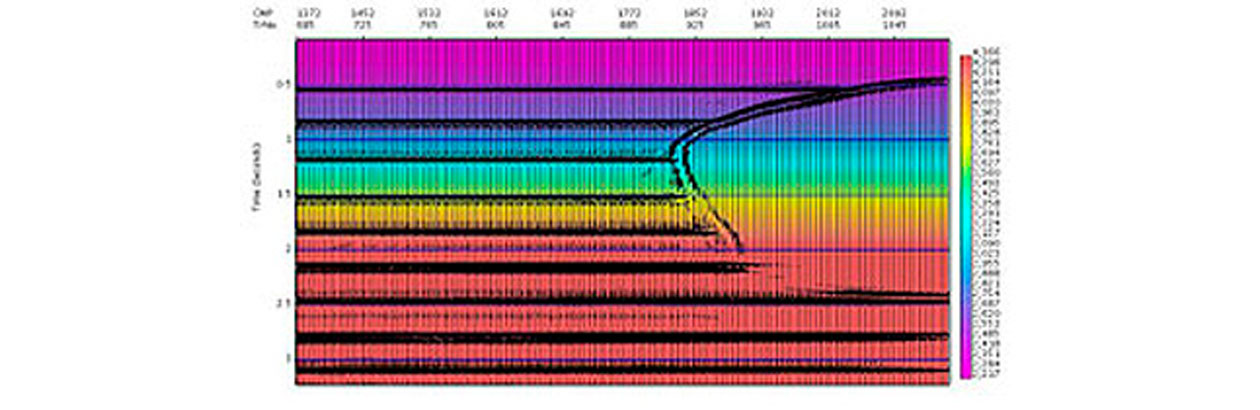
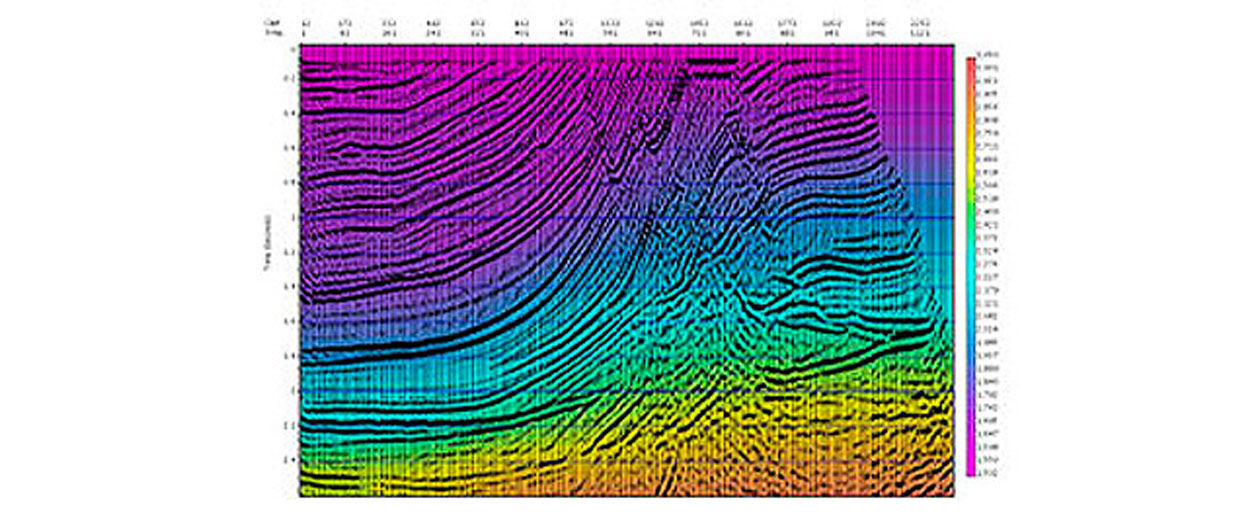
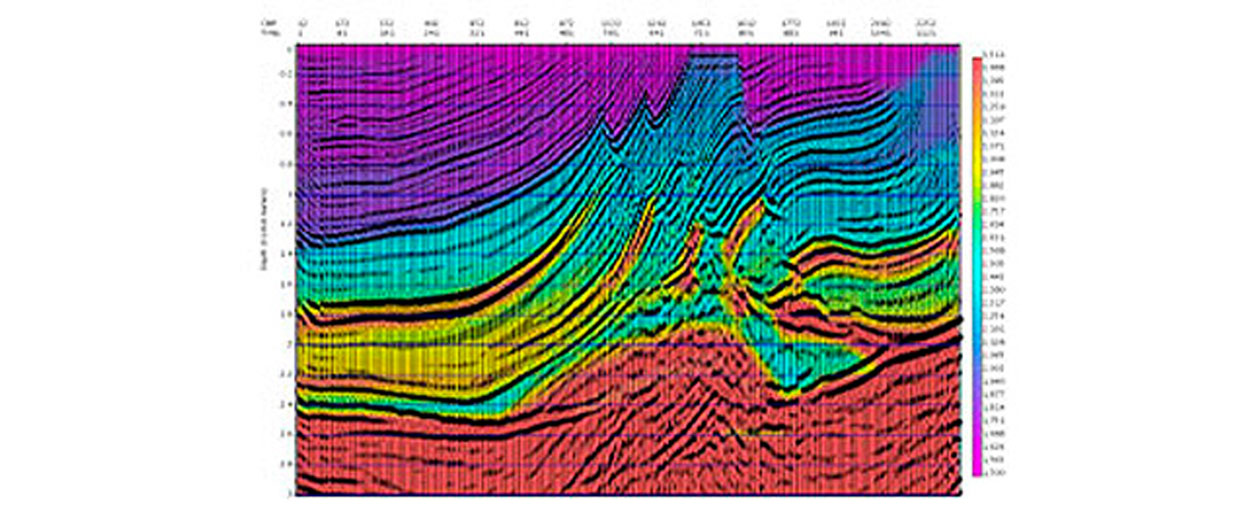
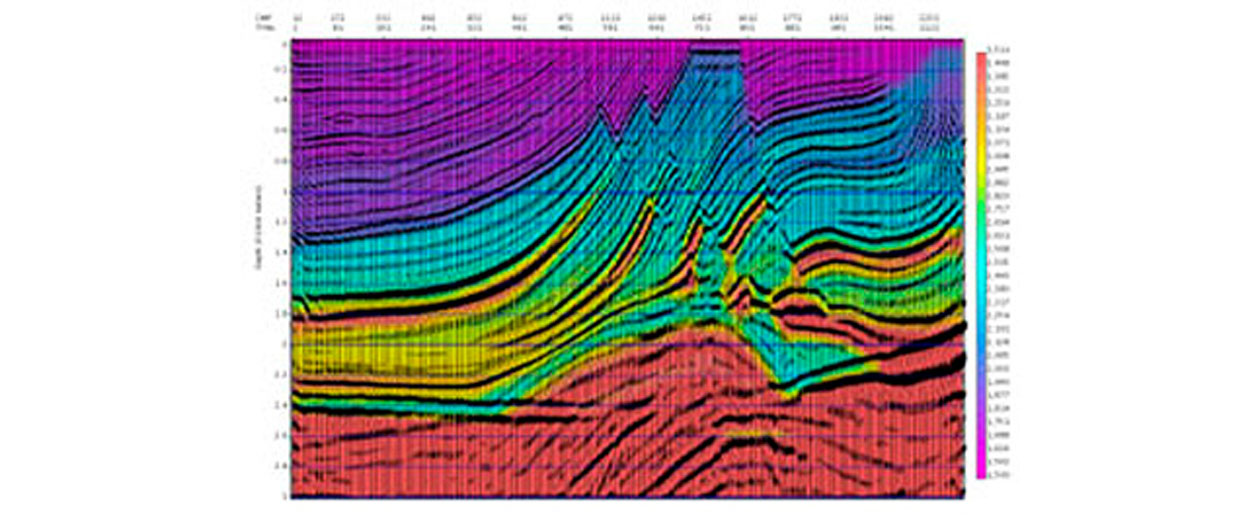
- curved ray and turning ray time migration results using the initial interval velocity model derived from the automatic imaging velocities. Results shown in Figure 3a,b,c are from a model with a v(z) velocity field (with an average gradient of 800 m/sec per km.) with a salt-like body embedded. Using finite difference model data, the conventional time image and velocities were calculated (Figure 3a, with time migration velocity overlain). Using the initial interval velocity model then derived from the automatic velocity, curved ray plus turning ray time migration was computed (Figure 3b, with calculated interval velocity overlain).
- automatic time imaging of the Marmousi data set, with subsequent depth migration using the initial interval velocity model constructed from the dense time migration velocity field. Shown in Figure 4a is the automatic time migration image, with RMS velocity overlain, in Figure 4b is the depth migration using the initial interval velocity model (overlain), and in Figure 4c is the depth migration using the actual model interval velocity model (overlain).
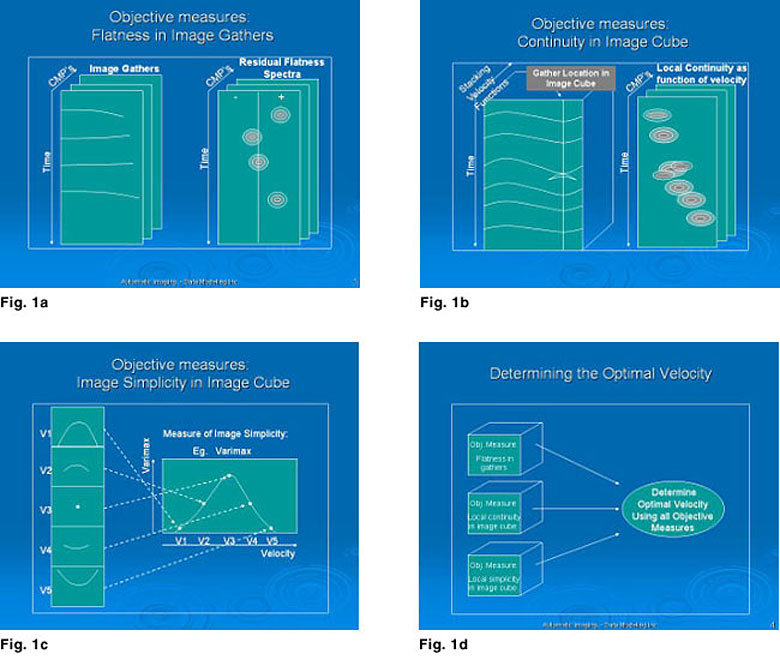
(a) Flatness of Image Gathers
(b) Local continuity on Image cube
(c) Image simplicity on Image Cube
(d) Determination of Optimal Velocity
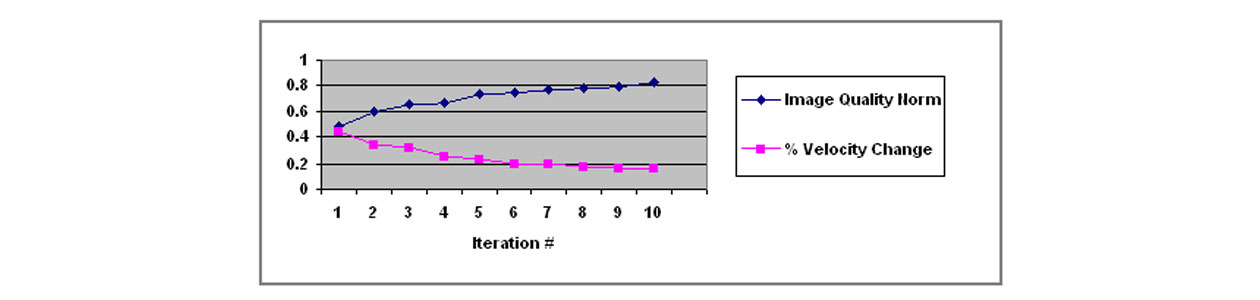
- Image Quality Norm
- % Velocity Change (average of all samples)
- Image quality (minimum entropy) measured by global Varimax
Biography
Kerry J. Stinson received his Masters in Geophysics at the University of British Columbia in 1982. While still at U.B.C., Mr. Stinson helped found ITA Inverse Theory and Applications, along with other U.B.C. researchers. This research driven company developed proprietary applications for the geophysical industry, and introduced Insight, one of the first interactive seismic processing systems. The Insight workstation formed the base for their seismic processing services, and was also sold commercially around the world.
In 1990, Landmark Graphics Inc. purchased ITA, with Mr. Stinson remaining with the new Landmark/ITA until 1993.
In 1994, Mr. Stinson and Dr. Shlomo Levy incorporated Atlantis Ventures Consulting Inc., to supply consulting and software design service, while continuing to work together on the development of the automation and optimization of major seismic processing tasks, such as imaging velocity determination and multiple suppression.
In 1996, they formed Data Modeling Inc., along with Dr. Wai-Kin Chan and Dr. Edward Crase, in order to accelerate development of their AutoImager software suite.
Mr. Stinson is a member of SEG and EAEG.